
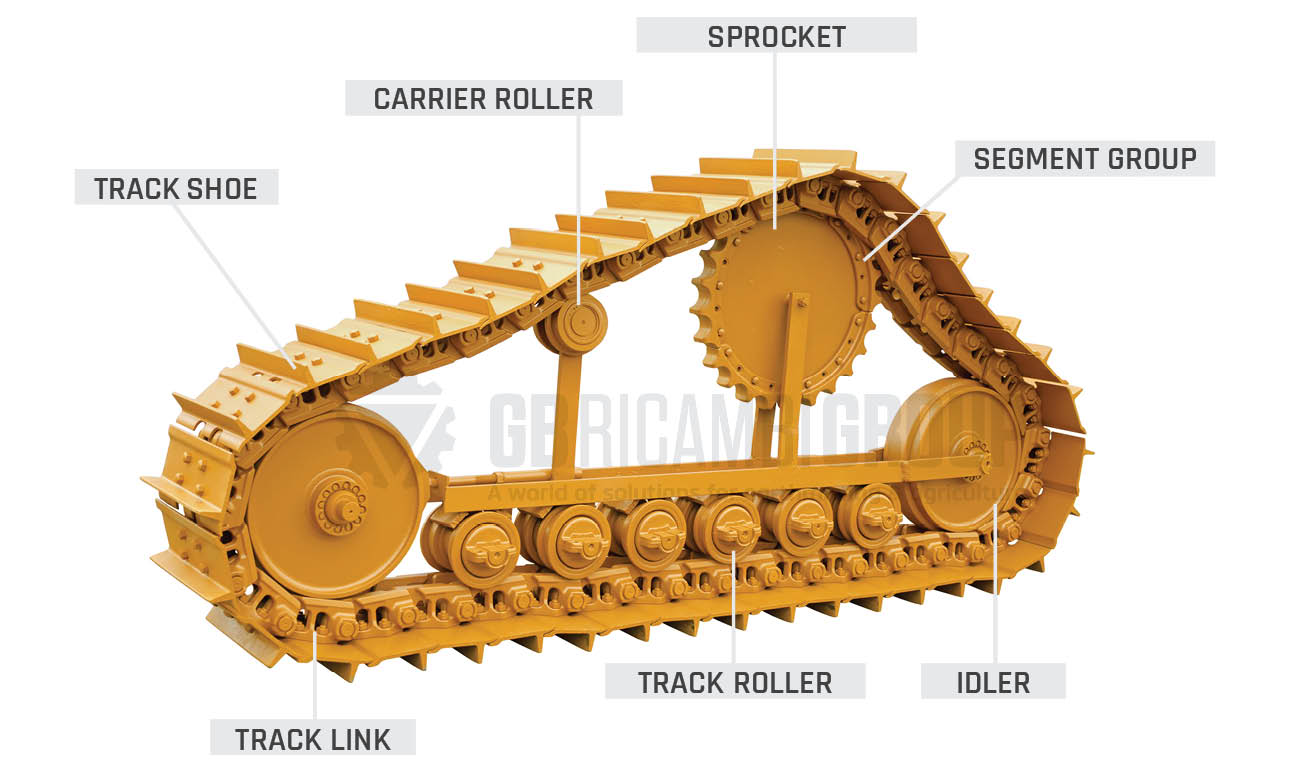
ກົນໄກການຍ່າງຂອງ crawler bulldozer ສ່ວນໃຫຍ່ແມ່ນປະກອບດ້ວຍ idler, roller ຂົນສົ່ງ, roller ຕິດຕາມ,ເກຍ, ການເຊື່ອມຕໍ່ຕິດຕາມ, ອຸປະກອນ tensing ຕົວກວາດເວັບ, ກອບການຍ່າງແລະອື່ນໆ.ຫນ້າທີ່ຕົ້ນຕໍຂອງມັນແມ່ນເພື່ອສະຫນັບສະຫນູນມະຫາຊົນຂອງຮ່າງກາຍ, ຫຼຸດຜ່ອນຜົນກະທົບແລະການສັ່ນສະເທືອນທີ່ເກີດຈາກພື້ນຜິວຖະຫນົນຫົນທາງທີ່ບໍ່ສະເຫມີກັນໃນ bulldozer, ແລະຫັນປ່ຽນຜົນຜະລິດພະລັງງານຂອງເຄື່ອງຈັກເຂົ້າໄປໃນຜົນບັງຄັບໃຊ້ traction. ໃນຂະບວນການຂອງການນໍາໃຊ້ bulldozer, ບາງຄັ້ງຈະມີການສວມໃສ່ຜິດປົກກະຕິຂອງການຊີ້ນໍາ. ລໍ້, sprocket ສະຫນັບສະຫນູນ, ລໍ້ສະຫນັບສະຫນູນແລະ crawler, ນັ້ນແມ່ນ, ປະກົດການ gnawing ຕິດຕາມ, ເຊິ່ງບໍ່ພຽງແຕ່ມີຜົນກະທົບປະສິດທິພາບການເຮັດວຽກຂອງ bulldozer, ແຕ່ຍັງຫຼຸດຜ່ອນອາຍຸການບໍລິການຂອງພາກສ່ວນເຫຼົ່ານີ້.
ບັນຫາການຕິດຂັດໂດຍ crawler bulldozer ແມ່ນບັນຫາທີ່ຫຍຸ້ງຍາກທີ່ສົ່ງຜົນກະທົບຕໍ່ຄຸນນະພາບຂອງຜະລິດຕະພັນ, ເຊິ່ງບໍ່ໄດ້ຮັບການແກ້ໄຂຢ່າງລະອຽດສໍາລັບເວລາດົນນານ. ມາຮອດນີ້, ພວກເຮົາໄດ້ຜ່ານການກວດສອບການຕິດຕາມ, ການວິເຄາະແລະການຄົ້ນຄວ້າຫຼາຍບ່ອນ, ແລະອາດຈະເຮັດໃຫ້ເກີດຄວາມເຄັ່ງຕຶງ. ບັນຫາຂອງ "ການຕິດຕາມ gnawing" ສໍາລັບການສືບສວນ. ພວກເຮົາຄິດວ່າເຫດຜົນຂອງການຕິດຕາມ gnawing ຂອງ crawler bulldozer ສ່ວນໃຫຍ່ແມ່ນຢູ່ໃນຄວາມທົນທານຂອງການເຊື່ອມໂລຫະແລະເຄື່ອງຈັກຂອງກອບແລະການປະກອບຂອງ "ສີ່ rollers" (idler, rollers carrier , roller ຕິດຕາມ. ແລະ sprocket).ການວິເຄາະສະເພາະດັ່ງຕໍ່ໄປນີ້, ແລະສະເຫນີ solutions.ກອບເປັນອົງປະກອບຫຼັກຂອງອຸປະກອນການຍ່າງຂອງ crawler bulldozer, ແລະ "ສີ່ rollers" ແລະອຸປະກອນ buffer ແຫນ້ນແມ່ນທັງສອງ.
ໃນເວລາທີ່ crawler bulldozer turns in place on the muddy ground, ຄວາມລົ້ມເຫຼວຂອງການລຸດລົງຫຼື gnawing ຕິດຕາມມັກຈະເກີດຂຶ້ນ, ເຊິ່ງຜົນກະທົບຕໍ່ການນໍາໃຊ້ປົກກະຕິຂອງເຄື່ອງຈັກ, ເຮັດໃຫ້ເກີດການສວມໃສ່ແລະ tear ຂອງພາກສ່ວນຂອງລະບົບຍ່າງແລະສັ້ນລົງ. ໂດຍຜ່ານການວິເຄາະຜົນບັງຄັບໃຊ້ແລະການປະຕິບັດການສ້ອມແປງ, ພວກເຮົາຄິດວ່າການປັບຕົວທີ່ສົມເຫດສົມຜົນສາມາດແກ້ໄຂບັນຫານີ້ຢ່າງລຽບງ່າຍ. ຜະລິດລົດໄຟຫຼຸດລົງ, ເຫດຜົນຕົ້ນຕໍທີ່ລົດໄຟ gnaw ແມ່ນ, ລະບົບຍ່າງ.ກອບແລະອຸປະກອນການຍ່າງຂອງຕົວກວາດເວັບຄວນໄດ້ຮັບການກວດກາເປັນປົກກະຕິເພື່ອຫຼີກເວັ້ນການຜິດປົກກະຕິຂອງກອບທີ່ເກີດຈາກການນໍາໃຊ້ທີ່ບໍ່ຖືກຕ້ອງແລະເຫດຜົນອື່ນໆ, ແລະຫຼຸດຜ່ອນການຕິດຕາມ gnawing ແລະປະກົດການສວມຜິດປົກກະຕິຂອງຕົວກວາດເວັບ.
ເວລາປະກາດ: ສິງຫາ-09-2021




